

Pada dasarnya, pesawat terbang mempunyai gerak dasar pesawat yang fungsinya agar pesawat dapat bergerak stabil pada saat terbang di udara. Adapun ketiga gerak dasar pesawat itu adalah sebagai berikut :
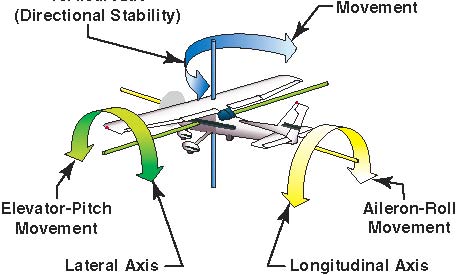
Gambar sumbu-sumbu pada pesawat
1. Pitching
Pitching merupakan gerakan menggangguk atau gerakan keatas dan kebawah dari nose pesawat, pitching bergerak pada sumbu lateral pesawat. Untuk dapat melakukan gerakan pitching, pilot menggerakkan bidang kendali utama atau primary control surface, yaitu dengan mengerakkan elevator yang terletak pada horizontal stabilizer. Pergerakan elevator dikendalikan dengan mengunakan stick control yang berada di dalam cockpit, stick digerakkan kedepan dan kebelang. Apabila stick digerakkan kebelakang, maka elevator up atau keatas dan akan mengakibatkan nose pesawat bergerak keatas. Apabila stick digerakkan kedepan, maka elevator down atau turun dan akan mengakibatkan nose pesawat bergerak turun kebawah. Gerakan pitching dilakukan pada saat pesawat akan melakukan take off (pada saat climbing atau terbang menanjak) dan landing (pada saat descent atau terbang menurun).


Gambar gerakan pitch pada pesawat
2. Rolling
Rolling merupakan gerakan berguling (roll) dari pesawat, rolling bergerak pada sumbu longitudinal pesawat. Untuk dapat melakukan gerakan rolling, pilot mengerakkan bidang kendali aileron yang berada di wing / sayap. Pergerakan aileron dikendalikan dengan mengunakan stick control yang berada di dalam cockpit, stick digerakkan ke kiri dan kekanan. Apabila stick digerakkan ke kanan, maka aileron sebelah kanan akan naik keatas dan aileron sebelah kiri wing akan turun kebawah. Hal ini akan menyebabkan pesawat akan rolling kesebelah kanan. Begitupula sebaliknya, apabila stick digerakkan ke kiri, maka aileron sebelah kiri akan naik dan aileron sebelah kanan akan turun. Hal ini akan menyebabkan pesawat akan rolling ke sebelah kiri. Gerakan rolling dilakukan pada saat pesawat akan berbelok atau bergerak ke arah kiri atau ke arah kanan.

Gambar gerakan roll pada pesawat
3. Yawing
Yawing merupakan gerakan menggeleng atau nose pesawat bergerak ke kanan dan ke kiri. Yawing bergerak pada sumbu vertikal pesawat. Untuk dapat melakukan gerakan yawing pada pesawat, pilot menggerakkan bidang kendali rudder yang berada pada vertical stabilizer. Pergerakan rudder dikendalikan dengan menggunakan rudder pedal (kanan dan kiri) yang berada didalam cockpit. Apabila pedal kanan diinjak, maka rudder akan bergerak kekanan dan nose pesawat akan mengarah ke kanan. Dan apabila pedal kiri diinjak, maka rudder akan bergerak kekiri dan nose pesawat akan mengarah ke kiri.

Gambar gerakan yaw pada pesawat
Sumber : www.grc.nasa.gov/WWW/K-12/airplane/




































